
 ТЌЦТюгУфъ
ТЌЦТюгУфъ









Т░ИС╣ЁуБЂуЪ│тљїТюЪсЃбсЃ╝сѓ┐сЃ╝
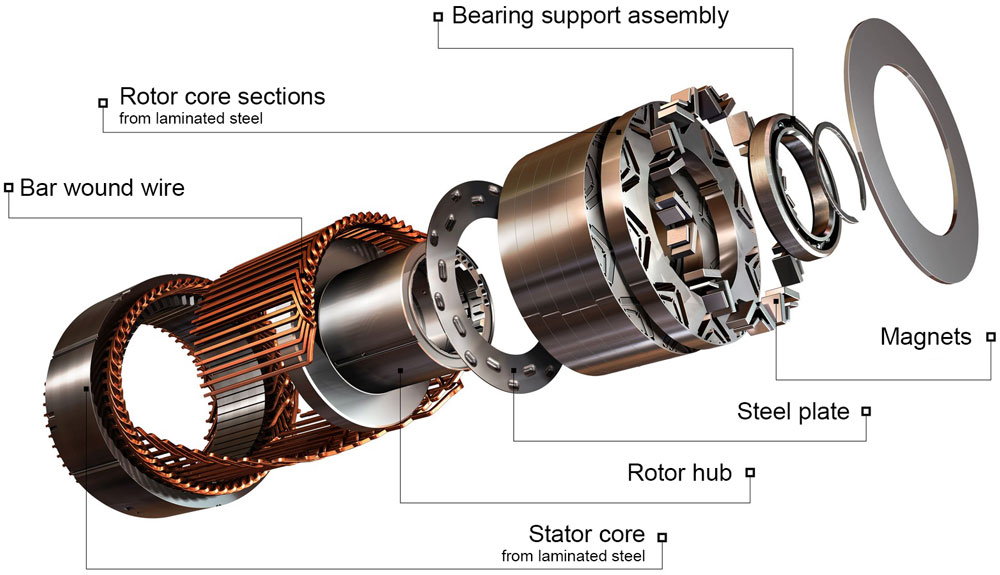
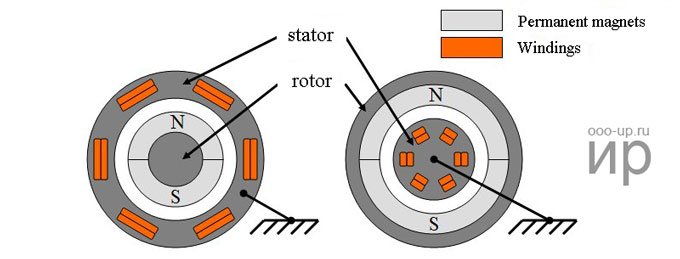
Т░ИС╣ЁуБЂуЪ│тљїТюЪсЃбсЃ╝сѓ┐сЂ«СИ╗сЂфжЂЋсЂё№╝ѕPMSM№╝ЅсЂЮсЂЌсЂдУфўт░јжЏ╗тІЋТЕЪсЂ»сЃГсЃ╝сѓ┐сЃ╝тєЁсЂФсЂѓсѓісЂЙсЂЎсђѓ тІЅт╝исЂЌсЂЙсЂЌсЂЪ 1 PMSM сѓњуц║сЂЎТїЂсЂБсЂдсЂёсЂЙсЂЎ ті╣ујЄ у┤ё2№╝Ё жЮътИИсЂФті╣ујЄуџёсЂф №╝ѕIE3№╝Ѕ сѓ╣сЃєсЃ╝сѓ┐сЂїтљїсЂўУеГУеѕсѓњТїЂсЂцсЂесЂесѓѓсЂФсђЂУфўт░јжЏ╗тІЋТЕЪ тЈ»тцЅтЉеТ│бТЋ░жДєтІЋ сѓ│сЃ│сЃѕсЃГсЃ╝сЃФсЂФСй┐ућесЂЋсѓїсЂЙсЂЎсђѓ сЂЊсЂ«та┤тљѕсђЂС╗ќсЂ«жЏ╗Т░ЌсЃбсЃ╝сѓ┐сЃ╝сЂеТ»ћУ╝ЃсЂЌсЂЪТ░ИС╣ЁуБЂуЪ│тљїТюЪжЏ╗тІЋТЕЪсЂ»ТюђжФўсЂ«сЃЉсЃЋсѓЕсЃ╝сЃъсЃ│сѓ╣сѓњТїЂсЂБсЂдсЂёсЂЙсЂЎсђѓжЏ╗Т║љ/жЪ│жЄЈсђЂсЃѕсЃФсѓ» / ТЁБТђДсЂфсЂЕ
Т░ИС╣ЁуБЂуЪ│тљїТюЪсЃбсЃ╝сѓ┐сЃ╝сЂ«сѓѕсЂєсЂфсѓѓсЂ«сЂДсЂЎ тЏъУ╗бжЏ╗тІЋТЕЪсђЂсЃГсЃ╝сѓ┐сЃ╝сЂеA сЂїсЂДсЂЇсЂЙсЂЎсђѓ тЏ║т«џтГљсЂ»тЏ║т«џсЂДсЂЎсђѓ тЏъУ╗бтГљсЂ»тЏъУ╗бсЂЌсЂдсЂёсѓІсђѓ
тЁИтъІуџёсЂФсЂ»сђЂтЏъУ╗бтГљсЂ»жЏ╗тІЋТЕЪсЂ«тЏ║т«џтГљсЂ«тєЁтЂ┤сЂФжЁЇуй«сЂЋсѓїсЂдсЂісѓісђЂтцќжЃетЏъУ╗бтГљсѓњТюЅсЂЎсѓІТДІжђасѓѓсЂѓсѓІсђѓ - СИГтцќсЂ«жЏ╗тІЋТЕЪсђѓ
the сЃГсЃ╝сѓ┐сЃ╝уБЂуЪ│сЂІсѓЅТѕљсѓісЂЙсЂЎсђѓ уБЂуЪ│сЂесЂЌсЂдсЂ»сђЂС┐ЮуБЂтіЏсЂ«жФўсЂёТЮљТќЎсЂїСй┐ућесЂЋсѓїсЂдсЂёсѓІсђѓ
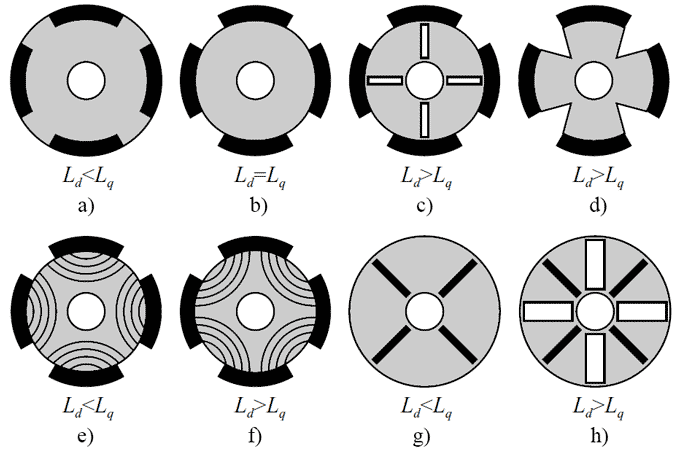
жЮъжАЋУЉЌсЂфжЏ╗тІЋТЕЪ сЃЮсЃ╝сЃФсЃГсЃ╝сѓ┐сЃ╝сЂ»уГЅсЂЌсЂёуЏ┤ТјЦсЂеуЏ┤С║цсѓцсЃ│сЃђсѓ»сѓ┐сЃ│сѓ╣сѓњТїЂсЂБсЂдсЂёсЂЙсЂЎсђѓ d = l Q. сђЂ сЂ«жќЊуфЂТЦхтЏъУ╗бтГљсѓњТюЅсЂЎсѓІжЏ╗тІЋТЕЪсЂ«сЂЪсѓЂсЂФуЏ┤С║цсѓцсЃ│сЃђсѓ»сѓ┐сЃ│сѓ╣сЂ»уЏ┤ТјЦLсЂФуГЅсЂЌсЂЈсЂфсЂё Q. РЅа l d сђѓ
the сѓ╣сЃєсЃ╝сѓ┐тцќТъасЂети╗уиџсЂІсѓЅсЂфсѓІсђѓ 2сЂц - сЂДТюђсѓѓСИђУѕгуџёсЂфсЃЄсѓХсѓцсЃ│3уЏИ .. ти╗уиџ
тѕєТЋБсЂЌсЂЙсЂЌсЂЪсѓ╣сЃГсЃЃсЃѕсЂ«ТЋ░сЂїсЂЊсЂ«сѓѕсЂєсЂфти╗уиџсѓњтЉ╝сЂ│тЄ║сЂЌсЂЙсЂЎсђѓсЃЮсЃ╝сЃФсЂесЃЋсѓДсЃ╝сѓ║q = 2,3сђЂ...сђЂ сђЂ Kсђѓ
Т┐ЃуИ« сЂЮсЂ«сѓѕсЂєсЂфти╗уиџсѓњтЉ╝сЂ│тЄ║сЂЌсђЂсЂЮсЂ«СИГсЂФсѓ╣сЃГсЃЃсЃѕТЋ░сЃЮсЃ╝сЃФсЂесЃЋсѓДсЃ╝сѓ║q = 1. сЂЊсЂ«та┤тљѕсђЂсѓ╣сЃГсЃЃсЃѕсЂ»сѓ╣сЃєсЃ╝сѓ┐сЂ«тЉетЏ▓сЂФтЮЄуГЅсЂФжЏбжќЊсЂЌсЂдсЂёсѓІсђѓ ти╗уиџсѓњтйбТѕљсЂЎсѓІ2сЂцсЂ«сѓ│сѓцсЃФсЂ»уЏ┤тѕЌсЂеInсЂесЂ«СИАТќ╣сЂДТјЦуХџсЂЎсѓІсЂЊсЂесЂїсЂДсЂЇсѓІсђѓ сЂЮсЂ«сѓѕсЂєсЂфти╗уиџсЂ«СИ╗сЂфТгауѓ╣сЂ»сђЂEMFТЏ▓уиџсЂ«тйбсЂФтй▒жЪ┐сѓњСИјсЂѕсѓІсЂЊсЂесЂїСИЇтЈ»УЃйсЂДсЂЎсђѓ [2] сђѓ
т░јСйЊтєЁсЂ«EMFТЏ▓уиџсЂ«тйбТЁІсЂ»сђЂтЏ║т«џтГљтЉетЏ▓сЂ«жџЎжќЊсЂФсЂісЂЉсѓІуБЂТ░ЌУфўт░јсЂ«тѕєтИЃТЏ▓уиџсЂФсѓѕсЂБсЂдТ▒║т«џсЂЋсѓїсѓІсђѓ
тЏъУ╗бтГљсЂ«уфЂТЦхСИІсЂ«жџЎжќЊсЂФсЂісЂЉсѓІуБЂТ░ЌУфўт░јсЂ»тЈ░тйбсѓњТюЅсЂЎсѓІсЂЊсЂесЂїуЪЦсѓЅсѓїсЂдсЂёсѓІсђѓ т░јСйЊтєЁсЂФУфўуЎ║сЂЋсѓїсЂЪEMFсЂ»тљїсЂўсЂДсЂѓсѓІсђѓ ТГБт╝дТ│бEMFсѓњСйюТѕљсЂЎсѓІт┐ЁУдЂсЂїсЂѓсѓісђЂТгАсЂФУфўт░јтѕєтИЃТЏ▓уиџсЂїУфўт░јтѕєтИЃсЂ«ТЏ▓уиџсЂїСИјсЂѕсѓЅсѓїсѓІсђѓ ТГБт╝дТ│бсђѓ сЂЊсЂ« тЏъУ╗бтГљсЂ«ТЦхсЂ«тЁѕуФ»сЂ«сЃЎсЃЎсЃФсЂФсѓѕсЂБсЂдС┐Ѓжђ▓сЂЋсѓїсЂЙсЂЎ [2] сђѓ
the тљїТюЪжЏ╗тІЋТЕЪсЂ«жЂІУ╗бтјЪуљє сЃГсЃ╝сѓ┐сЂ«тЏъУ╗буБЂуЋїсЂе сЃГсЃ╝сѓ┐сЂ«СИђт«џуБЂта┤сЂ«уЏИС║њСйюућесЂФтЪ║сЂЦсЂёсЂдсЂёсЂЙсЂЎсђѓ the тЏъУ╗буБЂта┤сЂ«Тдѓт┐х тљїТюЪсЃбсЃ╝сѓ┐сЂ«тЏ║т«џтГљсЂ«сЂєсЂАсЂ«1сЂцсЂ» 3уЏИ Уфўт░јсЃбсЃ╝сѓ┐сЃ╝ сђѓ
тљїТюЪжЏ╗тІЋТЕЪсЂ«тІЋСйютјЪуљєсЂ»сЂ«уЏИС║њСйюућесЂФтЪ║сЂЦсЂёсЂдсЂёсЂЙсЂЎ тЏъУ╗буБЂта┤сЃГсЃ╝сѓ┐сЂ«тЏ║т«џтГљсЂеСИђт«џуБЂта┤сЂ«сђѓ
AMPERE'S сЂ«сѓѕсЂєсЂФсђЂтЏ║т«џтГљти╗уиџсЂ«тљїТюЪС║цТхЂсЂеуЏИС║њСйюућесЂЎсѓІтЏъУ╗бтГљсЂ«уБЂуЋїТ│ЋтЙІсђЂСйюТѕљсЂЌсЂЙсЂЎ сЃѕсЃФсѓ» №╝ѕсЃГсЃ╝сѓ┐сЃ╝сѓњтЏъУ╗бсЂЋсЂЏсѓІсђѓ№╝ѕ .. сѓѓсЂБсЂе №╝Ѕ
PMSMсЂ«тЏъУ╗бтГљсЂФсЂѓсѓІТ░ИС╣ЁуБЂуЪ│т«џуБЂта┤сѓњСйюсѓісЂЙсЂЎсђѓ тЏ║т«џтГљуБЂта┤сѓњТюЅсЂЎсѓІтЏъУ╗бтГљсЂ«тЏъУ╗бжђЪт║дсЂДсЂ»сђЂсЃГсЃ╝сѓ┐уБЂТЦхсЂ» тЏ║т«џтГљсЂ«тЏъУ╗буБЂуЋїсЂежђБтІЋсЂЎсѓІсђѓ сЂЊсЂ«уѓ╣сЂФжќбсЂЌсЂдсђЂ PMSM сѓ╣сѓ┐сЃ╝сЃѕ сЂЮсѓїУЄфСйЊ сЂЮсЂ«тЙї сЂ«сЂесЂЇ 3уЏИсЂФуЏ┤ТјЦТјЦуХџсЂЋсѓїсЂдсЂёсЂЙсЂЎсђѓуЈЙтюесЂ«сЃЇсЃЃсЃѕсЃ»сЃ╝сѓ» №╝ѕжЏ╗тіЏуХ▓сЂ«жЏ╗ТхЂ жЏ╗тіЏуХ▓сЂ«тЉеТ│бТЋ░№╝Ѕ 50Hzсђѓ
Т░ИС╣ЁуБЂуЪ│тљїТюЪжЏ╗тІЋТЕЪсЂ»тѕХтЙАсѓисѓ╣сЃєсЃасђЂСЙІсЂѕсЂ░сђЂ тЈ»тцЅтЉеТ│бТЋ░жДєтІЋсЂЙсЂЪсЂ»сѓхсЃ╝сЃю сЃЅсЃЕсѓцсЃќсђѓ тѕХтЙАсЂЋсѓїсЂЪтѕХтЙАТіђУАЊсЂїтцџТЋ░сЂѓсѓІсђѓ ТюђжЂЕсЂфтѕХтЙАТќ╣Т│ЋсЂ«жЂИТіъсЂ»сђЂСИ╗сЂФжЏ╗Т░ЌсЂ«тЅЇсЂФуй«сЂІсѓїсЂдсЂёсѓІсѓ┐сѓ╣сѓ»сЂФсѓѕсЂБсЂдуЋ░сЂфсѓісЂЙсЂЎсђѓ Т░ИС╣ЁуБЂуЪ│тљїТюЪжЏ╗тІЋТЕЪсѓњтѕХтЙАсЂЎсѓІсЂЪсѓЂсЂ«СИ╗сЂфТќ╣Т│ЋсѓњУАесЂФуц║сЂЎсђѓ
| сѓ│сЃ│сЃѕсЃГсЃ╝сЃФ | adv adv | уЪГТЅђ | |||
|---|---|---|---|---|---|
| сѓ╣сѓФсЃЕсЃ╝ | тЇўу┤ћсЂфтѕХтЙАТќ╣т╝Ј | сѓ│сЃ│сЃѕсЃГсЃ╝сЃФсЂ»ТюђжЂЕсЂДсЂ»сЂфсЂЈсђЂсѓ┐сѓ╣сѓ»сЂФсЂ»жЂЕсЂЌсЂдсЂёсЂЙсЂЏсѓЊсђѓтЈ»тцЅУЇижЄЇсђЂтѕХтЙАТљЇтц▒сЂїтЈ»УЃйсЂДсЂЎ | |||
| СйЇуй«сѓ╗сЃ│сѓхсЃ╝С╗ўсЂЇ | сЃГсЃ╝сѓ┐СйЇуй«сЂесЃбсЃ╝сѓ┐тЏъУ╗бжђЪт║дсЂ«Т╗ЉсѓЅсЂІсЂДТГБуб║сЂфУеГт«џсђЂтцДсЂЇсЂфтѕХтЙАу»ётЏ▓ | сЃГсЃ╝сѓ┐сЃ╝СйЇуй«сѓ╗сЃ│сѓхсЂет╝итіЏсЂїт┐ЁУдЂсЂДсЂЎсђѓсЃъсѓцсѓ»сЃГсѓ│сЃ│сЃѕсЃГсЃ╝сЃЕ сѓ│сЃ│сЃѕсЃГсЃ╝сЃФсѓисѓ╣сЃєсЃатєЁ | |||
| сЃЮсѓИсѓисЃДсЃ│сѓ╗сЃ│сѓхсЃ╝ | сЃГсЃ╝сѓ┐сЃ╝СйЇуй«сѓ╗сЃ│сѓхсЃ╝сЂ»т┐ЁУдЂсЂѓсѓісЂЙсЂЏсѓЊсђѓ сЃГсЃ╝сѓ┐СйЇуй«сЂесЃбсЃ╝сѓ┐сЂ«тЏъУ╗бжђЪт║дсЂ«Т╗ЉсѓЅсЂІсЂДТГБуб║сЂфУеГт«џсђЂтцДсЂЇсЂфтѕХтЙАу»ётЏ▓сђЂ СйЇуй«сѓ╗сЃ│сѓхсЃ╝С╗ўсЂЇ | сѓ╗сЃ│сѓхсЃгсѓ╣ сЃЋсѓБсЃ╝сЃФсЃЅТїЄтљЉтѕХтЙА сЃЋсЃФсѓ╣сЃћсЃ╝сЃЅу»ётЏ▓ PMSM сЂ«сЂ┐тЈ»УЃйсЂДсЂЎжАЋУЉЌсЂфсЃЮсЃ╝сЃФсЃГсЃ╝сѓ┐сЃ╝сЂДсЂ»сђЂт╝итіЏсЂфтѕХтЙАсѓисѓ╣сЃєсЃасЂїт┐ЁУдЂсЂДсЂЎ | |||
| уЏ┤ТјЦсЃѕсЃФсѓ»тѕХтЙА | у░АтЇўсЂфтѕХтЙАтЏъУи»сђЂУЅ»тЦйсЂфтІЋуџёТђДУЃйсђЂт║ЃсЂётѕХтЙАу»ётЏ▓сђЂсЃГсЃ╝сѓ┐сЃ╝СйЇуй«сѓ╗сЃ│сѓхсЃ╝сЂ»т┐ЁУдЂсЂѓсѓісЂЙсЂЏсѓЊ | жФўсЃѕсЃФсѓ»сЂежЏ╗ТхЂсЃфсЃЃсЃЌсЃФ | |||
| сѓфсЃ╝сЃЌсЃ│сЃФсЃ╝сЃЌ | тЇўу┤ћсЂфтѕХтЙАТќ╣т╝Ј | сѓ│сЃ│сЃѕсЃГсЃ╝сЃФсЂ»ТюђжЂЕсЂДсЂ»сЂфсЂЈсђЂсѓ┐сѓ╣сѓ»сЂФсЂ»жЂЕсЂЌсЂдсЂёсЂЙсЂЏсѓЊсђѓтЈ»тцЅУЇижЄЇсђЂтѕХтЙАТљЇтц▒сЂїтЈ»УЃйсЂДсЂЎ | |||
| сЃЮсѓИсѓисЃДсЃ│сѓ╗сЃ│сѓхсЃ╝ №╝ѕсЃЏсЃ╝сЃФ сѓ╗сЃ│сѓхсЃ╝№╝Ѕ | тЇўу┤ћсЂфтѕХтЙАТќ╣т╝Ј | сЃЏсЃ╝сЃФсѓ╗сЃ│сѓхсЃ╝сЂїт┐ЁУдЂсЂДсЂЎсђѓ сЃѕсЃФсѓ»сЂїсЂѓсѓісЂЙсЂЎсђѓ PMSM сЂ«тѕХтЙАсѓњуЏ«уџёсЂесЂЌсЂдсЂёсЂЙсЂЎтЈ░тйбУЃїСИГEMFсѓњСй┐сЂБсЂд тѕХтЙА PMSM ТГБт╝дТ│бжђєEMFсЂДсЂ»сђЂт╣│тЮЄсЃѕсЃФсѓ»сЂ»5№╝ЁСйјсЂёсђѓ | |||
| сѓ╗сЃ│сѓхсЃ╝ | сѓѕсѓіт╝итіЏсЂфтѕХтЙАсѓисѓ╣сЃєсЃасЂїт┐ЁУдЂсЂДсЂЎ | СйјжђЪсЂФсЂ»жЂЕсЂЌсЂдсЂёсЂЙсЂЏсѓЊсђѓ сЃѕсЃФсѓ»сЂїсЂѓсѓісЂЙсЂЎсђѓ PMSM сЂ«тѕХтЙАсѓњуЏ«уџёсЂесЂЌсЂдсЂёсЂЙсЂЎтЈ░тйбУЃїСИГEMFсѓњСй┐сЂБсЂд тѕХтЙА PMSM ТГБт╝дТ│бжђєEMFсЂДсЂ»сђЂт╣│тЮЄсЃѕсЃФсѓ»сЂ»5№╝ЁСйјсЂёсђѓ | |||
сЂФ сѓисЃ│сЃЌсЃФсЂфсѓ┐сѓ╣сѓ»сѓњУДБсЂЈжђџтИИсђЂсЃЏсЃ╝сЃФсѓ╗сЃ│сѓхсЃ╝сЂесЂ«тЈ░тйбтѕХтЙАсЂїСй┐ућесЂЋсѓїсЂЙсЂЎсђѓ№╝ѕсЂ«сЂЪсѓЂсЂ«сѓѓсЂ«сђЂсѓ│сЃ│сЃћсЃЦсЃ╝сѓ┐сЃЋсѓАсЃ│№╝Ѕсђѓ сЂФ жЏ╗Т░ЌсЃЅсЃЕсѓцсЃќсЂІсѓЅТюђтцДсЂ«ТђДУЃйсЂїт┐ЁУдЂсЂфтЋЈжАїсѓњУДБТ▒║сЂЌсЂЙсЂЎсђѓсЃЋсѓБсЃ╝сЃФсЃЅТїЄтљЉтѕХтЙАсЂ»жђџтИИжЂИТіъсЂЋсѓїсЂдсЂёсЂЙсЂЎсђѓ
Т░ИС╣ЁуБЂуЪ│тљїТюЪжЏ╗тІЋТЕЪсЂ«тѕХтЙАсЂ«Тюђсѓѓу░АтЇўсЂфТќ╣Т│ЋсЂ«1сЂцсЂДсЂЎсђѓ - тЈ░тйб сѓ│сЃ│сЃѕсЃГсЃ╝сЃФсђѓ тЈ░тйбтѕХтЙАсЂ» PMSM сѓњтѕХтЙАсЂЎсѓІсЂЪсѓЂсЂФСй┐ућесЂЋсѓїсЂЙсЂЎсђѓтЈ░тйбсЂ«УЃїСИГсѓњС╝┤сЂє EMFсђѓ тљїТЎѓсЂФсђЂсЂЊсЂ«Тќ╣Т│ЋсЂДсѓѓсђѓPMSM сѓњтѕХтЙАсЂЎсѓІсЂЊсЂесѓѓсЂДсЂЇсЂЙсЂЎсђѓТГБт╝дТ│бжђєУхижЏ╗тіЏсЂДсЂ»сЂфсЂЈсђЂжЏ╗Т░ЌжДєтІЋУБЁуй«сЂ«т╣│тЮЄсЃѕсЃФсѓ»сЂ»5№╝ЁСйјсЂЈсЂфсѓісђЂсЃѕсЃФсѓ»сЃфсЃЃсЃЌсЃФсЂ» 14№╝ЁсЂДсЂЎсђѓТюђтцДтђц сЃЋсѓБсЃ╝сЃЅсЃљсЃЃсѓ»сЂфсЂЌсЂДтЈ░тйбтѕХтЙАсЂїсЂѓсѓісђЂсЃГсЃ╝сѓ┐сЂ«сЃЋсѓБсЃ╝сЃЅсЃљсЃЃсѓ»сЂїсЂѓсѓісЂЙсЂЎсђѓ
the сѓфсЃ╝сЃЌсЃ│сЃФсЃ╝сЃЌсѓ│сЃ│сЃѕсЃГсЃ╝сЃФ №╝ѕсЂфсЂЌ сЃЋсѓБсЃ╝сЃЅсЃљсЃЃсѓ»№╝Ѕ ТюђжЂЕсЂДсЂ»сЂфсЂЈсђЂ PMSMсЂ«сЃфсЃфсЃ╝сѓ╣сЂФсЂцсЂфсЂїсѓІтЈ»УЃйТђДсЂїсЂѓсѓісЂЙсЂЎсђѓтљїТюЪсЂЌсЂдсЂёсЂфсЂёсђЂсЂЎсЂфсѓЈсЂА тѕХтЙАТђДсЂ«тќфтц▒сђѓ
СИЅуЏИсЂ«сЃГсЃ╝сѓ┐сЃ╝СйЇуй«сѓ╗сЃ│сѓхсЂесЂЌсЂдтЈ░тйбтѕХтЙАсђЂжЏ╗тІЋТЕЪсЂФтєЁУћхсЂЋсѓїсЂЪ3сЂцсЂ«сЃЏсЃ╝сЃФсѓ╗сЃ│сѓхсЂїСИђУѕгуџёсЂФСй┐ућесЂЋсѓїсЂдсЂісѓісђЂ ╬хсЂ«у▓Йт║дсЂДУДњт║дсѓњТ▒║т«џсЂЎсѓІсЂЊсЂесЂїсЂДсЂЇсЂЙсЂЎсђѓ 30 тГдСйЇсђѓ сЂЊсЂ«тѕХтЙАсЂФсѓѕсѓісђЂсѓ╣сЃєсЃ╝сѓ┐жЏ╗ТхЂсЃЎсѓ»сЃѕсЃФсЂ»1сЂцсЂ«жЏ╗тіЏтЉеТюЪсЂФт»ЙсЂЌсЂд6сЂцсЂ«СйЇуй«сЂЌсЂІсЂёсЂЙсЂЏсѓЊсђѓтЄ║тіЏсЂФсЃфсЃЃсЃЌсЃФсЃѕсЃФсѓ»сЂїсЂѓсѓІсђѓ

сЃЋсѓБсЃ╝сЃФсЃЅТїЄтљЉ сѓ│сЃ│сЃѕсЃГсЃ╝сЃФ №╝ѕFOC№╝Ѕ сѓ╣сЃасЃ╝сѓ║сЂФсђЂТГБуб║сЂІсЂцуІгуФІсЂЌсЂджђЪт║дсѓњтѕХтЙАсЂЎсѓІсЂЊсЂесЂїсЂДсЂЇсЂЙсЂЎсђѓ сЃѕсЃФсѓ»a сЃќсЃЕсѓисЃгсѓ╣ сЃбсЃ╝сѓ┐сЃ╝сђѓ сЃЋсѓБсЃ╝сЃФсЃЅТїЄтљЉтѕХтЙАсѓбсЃФсѓ┤сЃфсѓ║сЃасЂ«тІЋСйюсЂ»сђЂсЃќсЃЕсѓисЃгсѓ╣сЂ«тЏъУ╗бтГљсЂ«СйЇуй«сѓњуЪЦсѓІт┐ЁУдЂсЂїсЂѓсѓІсђѓ сЃбсЃ╝сѓ┐сЃ╝сђѓ

С╗ЦТЮЦ 1970т╣┤С╗Бсѓ╗сЃ│сѓхсЃфсЃ╝ .. сЃќсЃЕсѓисЃгсѓ╣ сЃЎсѓ»сѓ┐сЃ╝тѕХтЙАТќ╣Т│Ћ С║цТхЂ сЃбсЃ╝сѓ┐сЃ╝сѓ║сЃъсѓцсѓ»сЃГсЃЌсЃГсѓ╗сЃЃсѓхсЂ«ТђЦжђЪсЂфуЎ║т▒ЋсЂ«сЂісЂІсЂњсЂДсђЂжќІуЎ║сЂЋсѓїтДІсѓЂсЂЙсЂЌсЂЪсђѓ ТюђтѕЮсЂ«сѓ╗сЃ│сѓхсЃгсѓ╣ УДњт║дсѓњТјет«џсЂЎсѓІсЂЪсѓЂсЂ«Тќ╣Т│ЋсЂ»сђЂжЏ╗тІЋТЕЪсЂ«уЅ╣ТђДсЂФтЪ║сЂЦсЂёсЂдсЂісѓісЂЙсЂЎсђѓ тЏъУ╗б сЃбсЃ╝сѓ┐сЃљсЃЃсѓ»EMFсЂФсЂ»сђЂсЃГсЃ╝сѓ┐сЂ«СйЇуй«сЂФжќбсЂЎсѓІТЃЁта▒сЂїтљФсЂЙсѓїсЂдсЂёсѓІсЂЪсѓЂсђЂжЮЎТГбт║ДТеЎу│╗сЂ«жђєEMFсЂ«тђцсѓњУеѕу«ЌсЂЎсѓІсЂЊсЂесЂДсђЂсЃГсЃ╝сѓ┐сЂ«СйЇуй«сѓњУеѕу«ЌсЂЎсѓІсЂЊсЂесЂїсЂДсЂЇсЂЙсЂЎсђѓ сЂЌсЂІсЂЌ сЂ«сЂесЂЇ тЏъУ╗бтГљсЂ»тЏъУ╗бсЂЌсЂдсЂёсЂфсЂёсђЂУЃїСИГтљѕсЂБсЂЪEMFсЂ»тГўтюесЂЌсЂфсЂёсЂ«сЂДсђЂУЃїСИГEMFсЂ»жењжЪ│сЂетї║тѕЦсЂЎсѓІсЂ«сЂїтЏ░жЏБсЂДсЂѓсѓІсЂЪсѓЂсђЂсЂЊсЂ«Тќ╣Т│ЋсЂ»СйјжђЪт║дсЂДсЃбсЃ╝сѓ┐сЃГсЃ╝сѓ┐сЂ«СйЇуй«сѓњТ▒║т«џсЂЎсѓІсЂ«сЂФсЂ»жЂЕсЂЌсЂдсЂёсЂфсЂёсђѓ сђѓ

уЈЙтюесђЂ сѓ╗сЃ│сѓхсЃгсѓ╣ сЃЋсѓБсЃ╝сЃФсЃЅТїЄтљЉ сѓ│сЃ│сЃѕсЃГсЃ╝сЃФ PMSM тЁежђЪт║ду»ётЏ▓сЂДсЂ»сђЂуфЂТЦхсѓњТюЅсЂЎсѓІсЃбсЃ╝сѓ┐сЂ«сЂ┐сЂїтЈ»УЃйсЂДсЂѓсѓІсђѓ
тйЊуцЙсЂ«УБйтЊЂсѓёPRICELISTсЂФжќбсЂЎсѓІсЂітЋЈсЂётљѕсѓЈсЂЏсЂ»сђЂуДЂжЂћсЂФС╗╗сЂЏсЂдсЂЈсЂасЂЋсЂёсђЂсЂЮсЂЌсЂдуДЂжЂћсЂ»24ТЎѓжќЊС╗ЦтєЁсЂФжђБухАсѓњтЈќсѓісЂЙсЂЎсђѓ





 сЂітЋЈсЂётљѕсѓЈсЂЏсѓІ :
сЂітЋЈсЂётљѕсѓЈсЂЏсѓІ :
жЏ╗УЕ▒ : +8613860661520
 уДЂжЂћсЂФжЏ╗тГљсЃАсЃ╝сЃФсѓњжђЂсѓі :
уДЂжЂћсЂФжЏ╗тГљсЃАсЃ╝сЃФсѓњжђЂсѓі :
EсЃАсЃ╝сЃФ : ivy@tech-zy.com
 СйЈТЅђ :
СйЈТЅђ :
Floor 16 Building#3, No.136. Kuiqi Road, Mawei District, Fuzhou City, Fujian Province, China
┬Е УЉЌСйюТеЕ: 2026 Fujian ZY Electric & Machinery Technology Co.,Ltd тЁеУЉЌСйюТеЕТЅђТюЅ.

IPv6 сЃЇсЃЃсЃѕсЃ»сЃ╝сѓ»сЂїсѓхсЃЮсЃ╝сЃѕсЂЋсѓїсЂдсЂёсЂЙсЂЎ






